Ground Reflections
© 2001-2014, Luigi Moreno, Torino, Italy
_______________________________________________________________
Summary
A radio path with ground reflection is examined. The reflection coefficient of different surfaces is discussed and several examples are given. The loss in received signal power is estimated, including the effect of antenna positioning and k-factor. Finally, the use of space diversity is considered and overall degradation is evaluated.
Paths with ground reflection
In radio hops over flat surfaces
and particularly over the sea (or other large water surfaces), a fraction of
the EM power emitted by the transmitter may reach the Rx antenna after
reflection on the flat surface. So, at
the receiver, the direct signal and the reflected signal (both coming from the
same transmitter) may interfere each other.
Signal reflections represent in
most cases a critical aspect of radio hop design and a potential source of
operating problems, if not correctly evaluated at the design stage.
In route planning and site
selection, a priority objective should always be to avoid hops with possible
ground reflections, as far as possible.
Obviously, alternative routes may be possible only in limited cases.
A
careful selection of site positioning and antenna height may be of help in
situations where such solution makes the reflected ray obstructed, at least
partially. While discussing on received signal level, it will be shown
that any technique, that reduces in some measure the reflected signal level, is
useful in reducing the overall impact of signal reflection.
The
first step in reflection analysis is to get all the geometrical elements useful to describe the reflection
mechanism. The
figure below gives a sketch of a radio path with ground reflection, showing the
main geometrical parameters.
Path with ground reflection, main geometrical
parameters.
· P = Reflection point;
· g = Grazing angle;
· D = Direct path length;
· R1+R2 = Reflected path length;
· DL = R1+R2 - D = path length difference;
· a1, a2 = Angles
between Direct and Reflected rays at the two antennas.
Reflection coefficient
By
comparing the reflected radio wave to the incident one, amplitude and phase
modifications are observed. The
reflection coefficient is a complex number, where :
· the coefficient modulus is the amplitude ratio between the reflected
and the incident signals; it represents the signal attenuation due to the
reflection effect only;
· the coefficient phase gives the phase shift produced by reflection
(phase difference between the reflected and the incident signals).
The
reflection coefficient is a function of :
· signal frequency and polarization;
· electrical parameters of the reflecting surface (relative permittivity
and conductivity; diagrams are given in ITU-R Rec. P-527 for different surface
types: water, dry soil, wet soil, etc.).
Additional
attenuation is caused by surface roughness, depending on soil irregularities or
sea waves. However, smooth surface
parameters usually represent a worst case assumption, with minimum loss.
Summary
of results
At very low grazing angles (g < 0.2 deg), the reflection
coefficient amplitude, on sea surfaces or wet soil, is close to unity (0 dB)
for both vertical and horizontal polarization; the phase is close to 180 deg.
For
horizontal polarization (any frequency), the above results are almost unchanged
when g increases up to about 4 deg
(higher values of the grazing angle are very unlikely).
On the
other hand, with vertical polarization and the same range of the grazing angle,
the reflection coefficient amplitude decreases to about 0.3 - 0.5 (-10 to -6
dB, the lowest loss being applicable to frequencies above 10 GHz). Also the phase decreases to 120° - 140° for
frequencies in the 1 - 3 GHz range, while it is closer to 180° range for
frequencies above 10 GHz.
While
the above results only give approximate indications on the actual numbers to
use in path design, it must be realized that the variable environment (for
example, wet or dry soil) and the surface roughness make it difficult even to
apply specific models and formulas to predict the reflection coefficient.
In most
cases, it is advisable to make use of worst case assumptions for the
coefficient amplitude, while not always a precise prediction on the phase shift
is required (as explained below).
![]()
Reflection coefficient computation
For a plane surface,
the reflection coefficient G can be computed, according to the
Fresnel law, as :
 Vertical polarization
Vertical polarization
 Horizontal polarization.
Horizontal polarization.
where
![]() is called complex
permittivity, g is the grazing angle, l [m] is the signal wavelength, while the electrical parameters of the
reflecting surface are :
is called complex
permittivity, g is the grazing angle, l [m] is the signal wavelength, while the electrical parameters of the
reflecting surface are :
er
relative dielectric constant;
s
electrical conductivity.
The expressions giving
the reflection
coefficient G can be specialized to the most
common reflecting surfaces, taking account of typical values of the surface
electrical parameters at different frequencies, as shown in the Tables below.
Relative dielectric constant er (dimensionless parameter) :
|
|
1 GHz |
3 GHz |
10 GHz |
30 GHz |
|
Sea water |
70 |
70 |
50 |
18 |
|
Fresh water |
80 |
80 |
70 |
28 |
|
Wet ground |
30 |
24 |
12 |
5.4 |
|
Very dry
ground |
4 |
4 |
4 |
4 |
|
Ice (-1 -10
°C) |
4 |
4 |
4 |
4 |
Electrical conductivity s [ohm-1 m-1]
:
|
|
1 GHz |
3 GHz |
10 GHz |
30 GHz |
|
Sea water |
5 |
7 |
18 |
40 |
|
Fresh water |
0.18 |
1.8 |
16 |
40 |
|
Wet ground |
0.15 |
0.7 |
3.2 |
11 |
|
Very dry
ground |
1.5 10-4 |
0.003 |
0.05 |
0.35 |
|
Ice (-1 -10
°C) |
2.5 - 8
10-4 |
0.6 - 2
10-3 |
2 - 6 10-3 |
0.5 - 1.7
10-2 |
Example of results are shown
in the figures below.
Reflection over
the sea surface
Amplitude of the reflection
coefficient vs. grazing angle.
Reflection over
the sea surface
Phase of the
reflection coefficient vs. grazing angle.
Reflection over a
fresh water surface
Amplitude of the
reflection coefficient vs. grazing angle.
Reflection over a
fresh water surface
Phase of the
reflection coefficient vs. grazing angle.
Reflection over
very dry soil
Amplitude of the
reflection coefficient vs. grazing angle
(the phase is
close to 180° for both H and V polarization).
Received signal level
The Rx
signal power results from the addition of the Direct and the Reflected signals
Vectorial
addition of two signals
We
measure "relative" signal amplitude and power as referred to the
direct signal only. The Relative Rx
Power (RRP, in dB), in the presence of a reflected ray, is :
where
b, b are the relative amplitude and
phase of the reflected ray, at the receiver input. The relative power (B, in
dB) of the reflected signal is :
![]()
The
figure below gives some examples of the result of the vectorial addition of two
signals, with different amplitudes and varying relative phase.
Received signal power in the presence of a reflected
signal,
whose relative power B is indicated by the labels
(relative power is referred to the direct signal
alone).
As
expected, if the direct and the reflected signals have equal amplitude (0 dB
curve), then the resulting signal fades completely when the two signals are in
phase opposition (relative phase 180 deg).
On the other hand, if the reflected signal is more and more attenuated
(B = -10, -20 dB curves), then the overall Rx signal shows a moderate
fluctuation, as a function of the relative phase between the direct and the
reflected signals.
Reflected
signal amplitude
In
order to estimate the relative amplitude of the two signals, we have to
identify the additional attenuation in the reflected signal, compared to the
direct one. Additional attenuation is mainly caused by :
· Reflection coefficient: as discussed above, it depends on
signal frequency and polarization, grazing angle and surface electrical
parameters; for reflection over water, the 0 dB loss (perfectly reflecting
surface) may be a worst case assumption.
· Divergence factor: this is a geometrical factor, which accounts for the
spherical shape of the reflecting earth surface, producing a divergence in the
reflected beam (not negligible in reflection paths with very small grazing
angle).
· Antenna gain reduction: assuming that the antenna is pointed in the
direct ray direction, then the gain in the reflected ray direction is given by
the antenna diagram at angles a1 and a2
(see reflection geometry); quite
often these angles are very small, but in some cases (e.g. short hops with
antennas very high over the reflecting surface) they produce a not negligible
reduction in the antenna gain. Even in absence of the complete antenna diagram,
the 3dB antenna beamwidth in the vertical plane can be
sufficient to estimate the reduction in antenna gain for a small deviation from
the antenna axis.
· Obstruction loss (if the reflection path is not perfectly clear): in
most cases it can be estimated as a "knife edge" obstruction, because this is a conservative
assumption and it is usually close to the actual conditions.
Reflected
signal phase
On the
other hand, the phase shift between the direct and the reflected signals
depends on :
· Path length difference DL: this distance is converted into a
phase shift, taking into account that a signal wavelength l corresponds to a 360 deg phase
rotation :
![]()
· Reflection coefficient phase: as
discussed above, in most cases it is close to 180 deg (phase reversal).
Rate
of change in the Rx signal amplitude
Since the wavelength l is of the order
of centimeters, then in most cases DL >> l. In such conditions, the above formula shows
that a fractional change in DL (as caused even by small
k-factor variations) produces a significant rotation of the d phase. The final effect is that :
· the direct and the reflected signals add with a
variable phase shift, which can be assumed as a random variable; amplitude
fluctuations are to be expected in the sum signal (received signal);
· the reflection coefficient phase is not so important
to be predicted, since it adds to the (randomly) variable phase shift d;
On the other hand, when
DL is of the same order of magnitude of (or even
smaller than) l, a fractional change in DL produces a
small rotation of the d phase. So, in
the vectorial addition of the direct and reflected signals, the phase angle is almost
constant and slow variations in the Rx power level are likely (low levels may
persist for long periods of time).
Antenna
height and k-factor effect
The above discussion shows that the reflected signal
amplitude and phase (relative to the direct one) are functions of the
geometrical reflection parameters. So, we expect that
· the overall Rx
signal level is a function of antenna position;
· for a given
antenna position, the Rx signal level is time variable, due to atmospheric variations
(changing k-factor);
· in particular
cases, a time-variable Rx level may be also produced by variations in the
reflecting surface (for example, tide movements).
The figure below (continuous line) shows the Rx power level
vs. antenna position. For a given antenna height (H1) the two signals (direct
and reflected) add in phase, so that the Rx signal level is maximum, while for
a different antenna position (H2) the two signals are in phase opposition and
the Rx level is minimum.
Received signal power vs. antenna height,
with two
values of the k-factor (continuous and dashed lines) (relative power is
referred to the direct signal alone).
The dashed line refers to a different atmosphere condition
(different k-factor) and shows that, even if the plots are similar, the antenna
positions corresponding to max / min Rx signal power are not stable.
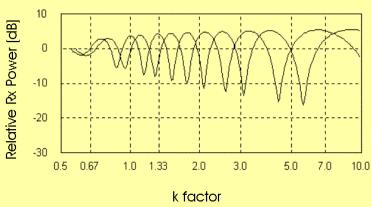
The effect of varying atmospheric conditions (k-factor) is
presented in the figure below. At a
constant antenna height, the received
signal level may be at a maximum or minimum value, depending on variations in
the k-factor.
Received signal power vs. k-factor, for a given
antenna height
(relative power is referred to the direct signal
alone).
Note : The examples
given in the previous figures are for a given reflection geometry, working
frequency, etc. Other patterns in the Rx power diagrams may be found with
different parameters. However, the comments suggested by these figures hold in
most applications.
· we cannot predict the exact
antenna position corresponding to maximum or minimum Rx power levels (since
this is not a static conditions, due
to k-factor variations);
· we can however compute the Rx power
range (vs. antenna position and k-factor);
· we can also compute the vertical
distance (H2 - H1) between the
antenna position for maximum Rx power and minimum Rx power.
Diversity reception
Generally
speaking, we implement a diversity system by using two different communications
channels to transmit the same information. At the receiver, the signals at the output
of the two channels are processed to get a reliable estimate of the transmitted
information. Basically, two techniques
can be used :
· the selection of
the signal that, at a given time, is estimated to offer the best quality
(diversity switching);
· the joint processing of the two
signals (diversity combining).
A
number of alternative implementations have been studied for each of the above
techniques, taking account of different operating contexts and design
constraints.
In any case, the basic requirement for effective diversity systems is that of a low correlation between the two channels, so that a low probability exists that both channels are in a bad state at the same time.
In
radio paths with ground reflection, the
two different communications channels can be implemented by using two
vertically separated antennas at the receiver site (space diversity).
The
reflection geometry is different for the two channels (different reflection
point P1 and P2, see figure below). So, it is expected that different signal
levels are received at the two antennas, at a given time.
Space Diversity reception in a radio hop with ground
reflection
In
order to find the optimum vertical spacing between the two antennas, we compute
the spacing DH
= (H2 - H1) between a maximum and a minimum in the Rx power vs. antenna height diagram.
With
antenna spacing DH,
it is expected that, while the Rx power level is minimum at one antenna, it is
close to the maximum at the other antenna, and vice versa. So, both antennas
are never in bad reception at the same time.
This
estimate of the optimum spacing applies to a given k-factor value. As a first
guess, the DH spacing is
computed with the standard k value (1.33).
Depending on the reflection geometry, this choice may be appropriate (or
not) also for different k values.
The
figure below shows the Rx power at the two antennas vs. k-factor. It gives a
simple way to check how the antenna spacing, computed for a given k, works with
other k values.
Same figure as
above, with a diversity antenna added;
optimum diversity spacing computed for k = 1.33
(relative
power is referred to the direct signal alone).
In this example, we see that at least one of the two antennas receives a high power level for any k value greater than 1 (the max/min patterns of the two diagrams are well interleaved). On the other hand, going to low k values (k<1), the two diagrams are closer and almost overlapping, so the diversity effect vanishes.
If the antenna spacing, optimized for standard k-factor, is not effective for other k-factors, possible suggestions are :
· to find a
compromise solution, taking account of the likely range of k-factor values;
· to revise (if possible) the overall reflection geometry (for example, by modifying the antenna height also at the other hop terminal).
In implementing a space diversity configuration, usually the additional (diversity) antenna is installed below the main antenna. The clearance rules for the main antenna are as indicated in the Path Clearance session.
For the diversity antenna, ITU-R Rec. P-530 gives the following clearance criteria :
· Normalized clearance
CNORM > 0.3 for an isolated obstacle;
· Normalized clearance CNORM > 0.6 for an obstacle extended along a portion of the path.
The above limits may be reduced to 0.0 and 0.3, respectively, "if necessary to avoid increasing heights of existing towers" and if the frequency is below 2 GHz.
Performance degradation
In the
previous chapters, the received signal power has been estimated for single and
diversity reception, as a function of antenna positioning and atmospheric state
(k-factor).
Under
some aspects, it is necessary to make worst case assumptions, for example in
the estimate of the reflection
coefficient.
An
overall estimate of performance degradation caused by ground reflection
requires that the Rx power loss be
averaged over the whole range of operating conditions.
The
average loss in Rx signal power is estimated for a given k-factor, by assuming
the phase shift between the direct and the reflected signals as a random
variable. Moreover, it is possible to
further average, over the expected range of k-factor variations.
Note
that the signal phase shift can be assumed as a random variable only if DL >> l
(path difference much larger than wavelength); this assumption has been discussed previously.
When
diversity reception is adopted, a similar average can be performed but, for
each operating conditions (k-factor value, signal phase shift), the antenna
with the higher signal is selected. This is equivalent to a diversity system
with ideal and instantaneous switching to the best signal; therefore, the
results computed under the above assumptions may be optimistic in some measure.
![]()
Average
degradation estimate
The
Rx signal power loss (LOSSREFL), in the presence of a reflected ray,
is given by the ratio of the direct signal power (normalized to 1) to the Rx
power with reflection :
![]()
where b, b are the relative amplitude and phase of the
reflected ray, at the receiver input.
When,
for a given reflection geometry and atmospheric state (k-factor), we can assume
b as a random variable (see
comments on the rate of change in the Rx signal amplitude), then the
LOSSREFL average over
the b uniform distribution is given by
(the bar over a symbol means "average value") :

(the integral solution is
not immediate and requires some careful mathematical processing).
Finally, the Threshold
Degradation due to reflection DREF
(in dB) is given by :
![]()
In more general terms, it
also necessary to further average the Rx signal power loss LOSSREFL, over a range of likely
k-factor values, since the reflection geometry (and specifically the reflected
ray amplitude b) is a function of k. Then we need to estimate an integral
expression of the type :

This is usually possible
only by numeric integration methods.
In digital
radio systems, additional degradation may be caused by signal distortions, when
the time delay of the reflected signal is comparable with the symbol period of
the digital modulation. This is not a
usual condition, but it is to be considered with some care.
![]()
Effect
of time delay on digital signals
In digital radio links, it
is necessary to compare the reflected signal delay t with the symbol
period TS, in order to estimate the reflection impairment on the
digital modulation.
When t << TS
there is no significant distortion of the digital signal format, since the
modulated pulses in the direct and reflected signals are almost overlapping at
the receiver; the only reflection impairment is due to the Rx signal
attenuation, as discussed previously.
If t is comparable
(<=) with TS, then the two-path (direct plus reflected signals)
channel transfer function produces a frequency-selective distortion on the signal
spectrum. The equipment
signature gives a measure of the additional reflection impairment, due to
Rx sensitivity to signal distortion.
Finally, the condition t > TS
is very unlikely. However, in this
case, the reflected signal appears as an external co-channel interference,
since the modulation applied to the direct signal is not coincident with the
modulation in the reflected signal. The
equipment BER vs. C/I
curve gives a measure of performance degradation under this condition.
Further Readings
Kuebler W. and Leggett R., "Deterministic calculation of terrain-dependent propagation losses", National Telecomm. Conf., Washington, 1979.
Vigants A., "Space diversity engineering", BSTJ, vol. 54, n. 1, January 1975, pp.103-142.
Fabbri F., "Antireflecting system for 2GHz over-sea radio links", Alta Frequenza, vol. 28, n. 8, August 1973, pp. 393-397.
Garcia-Lopez J.A. et al., "Design of hybrid diversity on overwater paths", Electronics Lett., vol. 18, n.10, May 1982, pp. 420-422.
End
of Session #4
_______________________________________________________________
© 2001-2014,
Luigi Moreno, Torino, Italy